Povl Filip Sonne-Frederiksen
Background
I hold both a Master’s and PhD in Architecture from the Aarhus School of Architecture. My academic background has given me a strong foundation in design thinking, spatial analysis, and problem-solving. While my degrees are in architecture, my professional journey has led me to software development, where I have found a passion for coding and creating digital solutions. Starting with visual programming in Grasshopper I quickly started writing scripts in Python and then developing a robot programming plugin for Grasshopper using C#. Since then, the focus of my PhD thesis has been on processing LiDAR data of indoor environments for semantic understanding and 3D construction of simplified building surface models for CAD/BIM applications.
In my spare time I have developed a passion for Linux and open source software. I maintain a home server running various services using NixOS where I strive for digital sovereignty and experiment with different technologies.
Professional Focus
I’m seeking opportunities in software development where I can apply my unique perspective from architecture to create well-structured, user-centered solutions and develop my skills further in a collaborative environment.
Professional Experience
LINK Arkitektur A/S, Copenhagen/Denmark.
Software Developer [2025 – Present]
LINK Arkitektur A/S, Copenhagen/Denmark.
PhD Fellow [2021 – 2024]
KHR Arkitektur A/S, Copenhagen/Denmark.
Architect [2019 – 2021]
Aarhus School of Architecture, Aarhus/Denmark.
Research Assistant, Robot Lab [2018 – 2021]
Education
Aarhus School of Architecture
PhD in Architecture [2021 - 2024]
Aarhus School of Architecture
Master of Architecture [2016 - 2018]
Leibniz University Hannover
Bachelor of Architecture [2012 - 2015]
Skills
Programming languages: C++, C#, python, typescript
Software & Frameworks: Linux, NixOs, docker
frameworks/libraries: OpenCV, CGAL, pyTorch, PCL
Software: Rhino/Grasshopper, Revit
Languages: English, German, Danish, Russian, French (basic)
Warning
This page will be updated with more details soon.

ReUseX
ReUseX is based on the Ph.D. research of Povl Filip Sonne-Frederiksen, focused on making the reuse of vacant buildings more practical and cost-effective. Vacant structures often end up demolished because reuse seems complex and uncertain. This research addresses that challenge by simplifying early-stage 3D mapping, providing accurate data and actionable insights right from the start. With better information early in the process, stakeholders can reduce risk, plan smarter, and make reuse a viable option—ultimately lowering the CO₂ footprint of construction and supporting circular economy principles. To achieve this, the research introduces a workflow that combines affordable scanning, intelligent segmentation, and streamlined reconstruction. Instead of relying on expensive, specialized scanners, the approach uses consumer-grade devices such as iPhones or iPads to capture LiDAR and RGB data, making early mapping possible before major budgets are allocated. Captured data is then processed using advanced algorithms to identify and classify building components efficiently. By leveraging image-based models, segmentation becomes both accurate and computationally efficient, enabling quick resource assessments.
Read More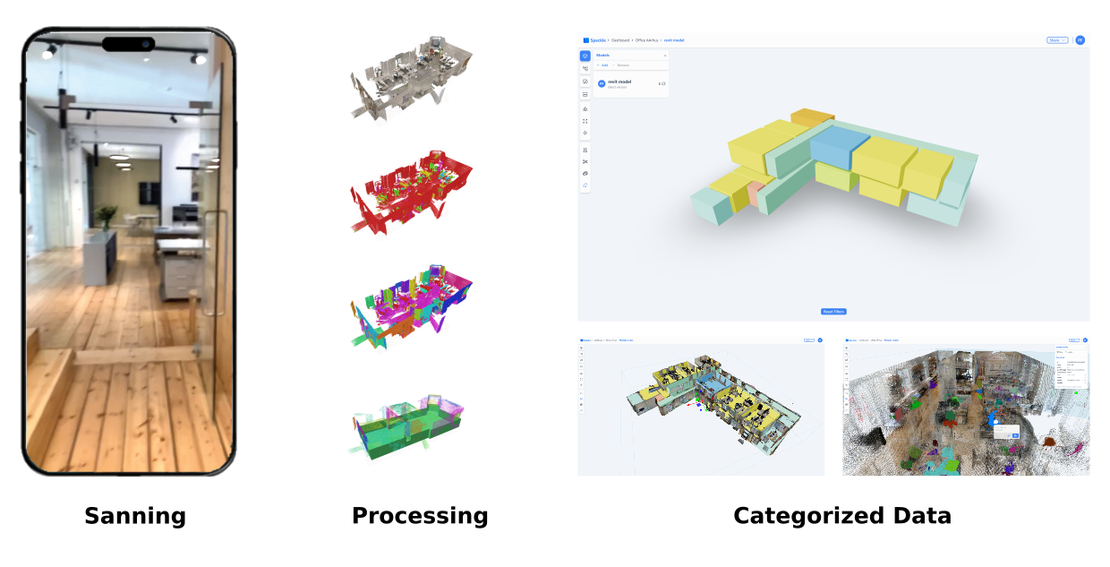
3D Mapping of Vacant Buildings for Reuse
The Environmental Imperative: From Demolition to Reuse The construction industry currently stands as one of the most significant contributors to environmental degradation, accounting for approximately 40% of global greenhouse gas emissions. To meet the urgent demands of climate change mitigation, a fundamental shift is required: we must move away from the linear “take-make-waste” model of demolition and new construction and transition toward a circular economy. In this paradigm, existing buildings are viewed not as obstacles to development, but as valuable banks of materials and spaces to be maintained, repaired, or repurposed. Despite the clear environmental and regulatory incentives—such as the European Regulation on Taxonomy and new national CO2 budgets—architects face a daunting practical hurdle. Many of our existing, vacant structures suffer from a total lack of documentation. Original drawings are frequently missing or outdated, and undocumented modifications made over decades make it nearly impossible to accurately assess a building’s reuse potential without a costly and time-consuming manual survey. This research addresses this “documentation gap” by proposing a faster, more flexible way to map the built environment.
Read More
Axis
Parametric design tools like Grasshopper have democratized complex geometry creation. Industrial robots can fabricate these forms with incredible precision. But there’s a gap: translating digital designs into robot instructions typically requires manual coding in manufacturer-specific languages, a workflow that’s both tedious and error-prone. For designers working with ABB robots, this means learning RAPID—a programming language far removed from the visual, parametric thinking that defined their design process in the first place.
Read More
Defining Inhabitable Space through Form-Generation driven by Complex Wood Joinery
For architecture to become reality it has to go hand in hand with construction. This harmony of construction and architecture or structure and construction is summarised in the theory of tectonics.
Read More